

Messeapplikation mit Conveyor Tracking
Allgemeines
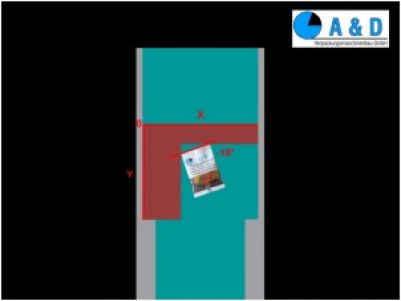
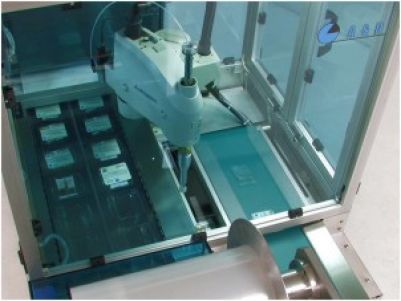
- Ein Roboter RH-5AH55 greift Teile von einem sich kontinuierlich laufenden Band.
- Die Teile werden mit einer Kamera (Cognex) lokalisiert. Das Transportband ist über einen externen Encoder mit dem Roboter verbunden, sodass dieser mit Hilfe der Kamera, die Position des zu greifenden Teils berechnen kann.
- Anbindung der Kamera via RS232
- Steuerung des Roboters und Visualisierung des Applikation mit einem E-Terminal E1071 (Anbindung ebenfalls via RS232)

1
2

3

4

5

6
Mediadaten
Auftraggeber
Anschrift
ADIRO Automatisierungstechnik GmbH
Limburgstraße 40
73734 Esslingen
Tel.: (49) 0711/919904-0
E-Mail: info(at)adiro.com